Durchblick bei schlechter Sicht
ZKW, AIT und FH Wiener Neustadt forschen an der Umfelderkennung von Fahrzeugen. Ziel ist der bessere Schutz von Fußgängern und Radfahrern.
Sie halten den Abstand und die Spur, sie überwachen den toten Winkel und helfen beim Einparken, sie warnen bei Kollisionsgefahr mit Personen oder anderen Fahrzeugen. Assistenzsysteme unterstützen beim Fahren und erhöhen die Verkehrssicherheit. Doch bei widrigen Wetterbedingungen und schlechter Sicht sind sie in ihrer Funktion eingeschränkt, denn die erforderlichen Sensoren, besonders Kameras, stoßen bei der Erfassung der Umgebung häufig an ihre Grenzen.
Deshalb arbeiten Expert:innen der ZKW Group (ZKW), des AIT Austrian Institute of Technology (AIT) sowie des Studiengangs Mechatronik der FH Wiener Neustadt im Forschungsprojekt „zoneZ“ an der Entwicklung einer robusten Fahrzeugumfelderkennung sowie eines innovativen Steuergerätekonzepts, das immer intelligentere Sicherheitsfunktionen für die Autos der Zukunft ermöglicht.
Fahrer:innen entlasten
Gemeinsames Ziel der Projektpartner ist es, verschiedene Fahrzeugsensoren zur Umgebungserfassung wie Radar, Kamera und Lidar direkt über ein leistungsfähiges Steuergerät anzusprechen. Aber auch Aktuatoren wie Scheinwerfer und Displays werden von diesem Steuergerät angesteuert.
Gleichzeitig wertet das Steuergerät sehr schnell in einem rechenintensiven Prozess die Daten der Umfeldsensoren aus, um daraus in Echtzeit ein virtuelles Modell der Fahrzeugumgebung zu erstellen. Die vielseitige Funktionalität des Steuergeräts bildet die Grundlage für verschiedene Anwendungen, wie etwa Fahrerassistenzfunktionen, Spotlight zum gezielten Ausleuchten gefährdeter Objekte, Parkassistenten oder Assistenten zum Schutz vulnerabler Verkehrsteilnehmer:innen.
Robuste Sensorik
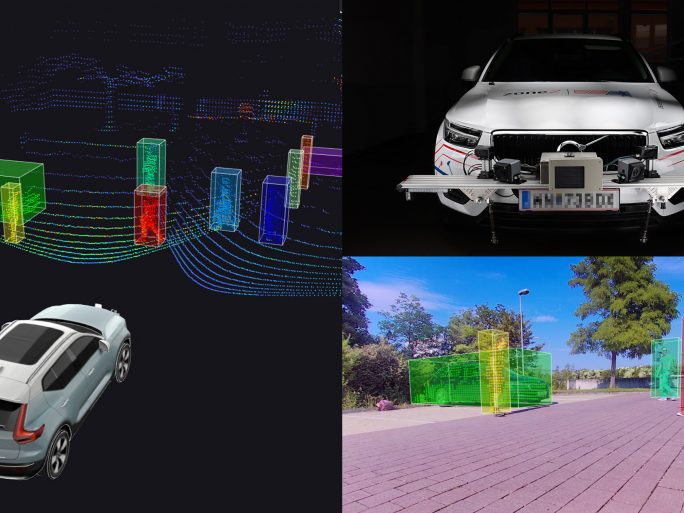
Das Team rund um Christian Zinner vom AIT Center for Vision, Automation & Control widmet sich der Frage, wie intelligente Fahrzeuge auch bei schwierigen Umgebungsbedingungen und schlechter Sicht ihre Umgebung verlässlich wahrnehmen können. Im Projekt kommen moderne 3D-Sensoren zum Einsatz, für deren Signale das AIT geeignete Auswertungsalgorithmen erforscht. Unter anderem werden auch Fusionskonzepte für robuste multimodale Sensorkonfigurationen untersucht. Die hier verwendeten sogenannten Imaging-3D-Radare und Lidar-Sensoren befinden sich derzeit in der Erprobung und sollen anschließend für den Einbau in Serienfahrzeugen zur Verfügung stehen.
„Es existiert auch heute noch kein ‚idealer‘ 3D-Sensor, der bei allen Sicht- und Wetterbedingungen gleichermaßen gut funktioniert und dabei ein beliebig detailliertes Abbild der Umgebung liefert. Neben den ‚Schönwettereigenschaften‘ eines Sensors muss daher verstärktes Interesse auf dessen Verhalten bei widrigen Bedingungen gelegt werden. Hier bringen wir unsere langjährige Expertise bei der Entwicklung von assistiven und autonomen Systemen für verschiedenste Anwendungsbereiche ein, da hier die robuste sensorische Erfassung der 3D-Umgebung immer eine Schlüsselkomponente darstellt,“ so Christian Zinner.
Zonale Architekturen
Um die Sensordaten im Fahrzeug verarbeiten zu können, beschäftigt sich das Team von ZKW maßgeblich mit der Frage von zukünftigen EE-Architekturen in der Automobilindustrie und den damit verbundenen Steuergerättypen. Ein klarer Trend geht in die Richtung der sogenannten Zonenarchitektur und den hierfür erforderlichen zonalen Steuergeräten.
Diverse Funktionen, die bisher einzelne Steuergeräte innehatten, werden in definierten Zonen gebündelt. Hier gilt es besonders die unterschiedlichen Entwicklungen und Anforderungen des Marktes im Zuge der Forschungsarbeit bestmöglich abzudecken und für potenzielle Serienentwicklungen vorzubereiten.
Der erste Demonstrator hierfür wurde bereits Ende letzten Jahres aufgebaut und wird nun schrittweise in Betrieb genommen und in die Zonenarchitektur integriert. Um die Möglichkeiten und Funktionalitäten zu demonstrieren, wird eine erste Demoapplikation zur Fußgängererkennung und damit zum Fußgängerschutz am System umgesetzt.
Fußgängererkennung mittels AI
Die von den unterschiedlichen Sensoren erfassten Umgebungsdaten werden mit Hilfe von Methoden der Künstlichen Intelligenz (KI) verarbeitet, um besonders gefährdete Verkehrsteilnehmer:innen, wie Kinder, Fußgänger:innen oder Radfahrer:innen zuverlässig zu erkennen. Für das Training der KI-Algorithmen ist die Analyse von tausenden unterschiedlichen Verkehrssituationen erforderlich. Daher werden verschiedenste Szenarien zunächst mit Hilfe von Computersimulationen nachgestellt und daraus die für das KI-System erforderlichen Sensordaten abgeleitet.
Die finale Feinabstimmung der Auswerteverfahren erfolgt mit Hilfe von realen Messdaten, die bei Fahrten mit dem Versuchsfahrzeug aufgezeichnet werden. Nach Abschluss der Trainingsphase stehen unterschiedliche KI-Algorithmen für die Demoapplikation zum Fußgängerschutz zu Verfügung. Nachdem die Fußgängererkennung im Steuergerät autonom und in Echtzeit erfolgen muss, liegt der Schwerpunkt der Entwicklung auf dem Einsatz von Verfahren, die in Bezug auf Rechenleistung und Energieverbrauch besonders effizient sind.
Das Projekt zoneZ wird gefördert im Rahmen des FTI-Programms Mobilität der Zukunft durch das Bundesministerium für Klimaschutz und von der Österreichischen Forschungsförderungsgesellschaft abgewickelt.